Grupo 4 Tarea 1 TE2 2018 A

| Título | Grupo 4 Tarea 1 TE2 2018 A |
|---|---|
| Asignatura | Estructuras II |
| Del Curso | Estructura II 1º Semestre 2018 |
| Carreras | Arquitectura |
| Nº | 1 |
| Alumno(s) | Britanny Steel Osorio, Dante Letelier, Beatriz Jimenez, Susana Silva, Victoria Rojas Cifuentes |
Introducción
Empezamos con el desafío de desarrollar una escultura cinética inspirada en las obras del escultor Theo Jansen, la cual se desplaza transformando un impulso horizontal(movimiento lineal) en un movimiento rotatorio que permita, a su vez, movilizar la estructura. Dentro de los requerimientos se piden que aparezcan los siguientes elementos en un campo espacial de 40cmx40cmx40:
- Chasis: elementos lineales (forma triangular).
- Cigüeñal: paso de lineal a rotatorio, eje.
- Bielas: Vínculos.
- Patas: Mecanismo
A medida que investigamos al respecto surge una serie de conceptos que se requieren manejar antes de pasar a la etapa de diseño y construcción del mecanismo, los cuales revisaremos a continuación.
Principio de indeformabilidad del triángulo
Indeformabilidad del triángulo[1]
“Estructuras trianguladas
Tales estructuras basan su resistencia en lo que conocemos como indeformabilidad del triángulo. Este se puede describir desde el punto de vista constructivo, de la siguiente manera: Si construimos un triángulo de modo que sus aristas sean barras rígidas y sus vértices nudos articulados, y luego aplicamos fuerzas en los nudos (que en un sistema estático estarán en el plano del triángulo y se equilibrarán entre sí) entonces sucederá que las barras de nuestro triángulo solo resistirán esfuerzos axiales (tracciones o compresiones). Por lo tanto mientras las barras y los nudos resistan dichos esfuerzos axiales las deformaciones del triángulo serán mínimas.”[2]
De acuerdo a Baixas, una estructura de forma triangular cuyos vértices sean móviles puede soportar las fuerzas que un movimiento de desplazamiento pueden generar sobre él mismo a causa de su propio peso (tracción y compresión). Además, esto permite diseñar la forma de las vigas a modo de que resistan el esfuerzo que se genera sobre ellas, y no se deformen o se genere pandeo.
Theo Jansen y los Strandbeest

Theo Jansen es un artista y escultor cinético, vive y trabaja en Holanda. En 1990 desarrolló los Animaris (animales de playa), dedicándose a diseñar una "nueva naturaleza". Construye grandes figuras imitando esqueletos de animales que son capaces de caminar usando la fuerza del viento de las playas holandesas.

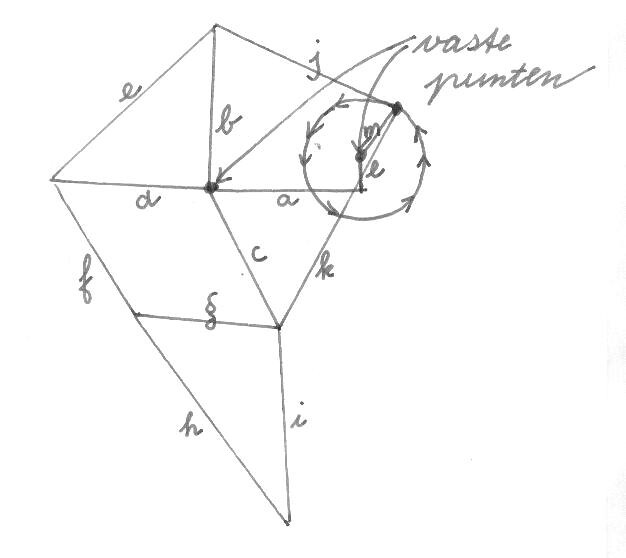
La parte más revolucionaria del trabajo de Jansen es, por lejos, el mecanismo de la pata que utiliza en sus Strandbeest (o animales de playa). La forma imita de manera simplificada la estructura de la pata de un cuadrúpedo y está conectada por sus vértices de forma tal que se genere un movimiento orgánico muy similar al de un animal vivo. Las proporciones ideales de esta estructura se obtuvieron por medio de simulaciones computarizadas a lo largo de meses de trabajo, y han sido compartidas por su autor en la web:
Donde a-c-f-j-k-l-m son barras móviles y los triángulos formados por los tramos b-e-d y g-h-i conforman las partes estáticas de la estructura.
Tesis de construcción
Llevando nuestra atención a los puntos recién mencionados, decidimos construir dos patas opuestas, unidas por el centro a un mismo tramo del cigüeñal, de forma que se genere al mismo tiempo un movimiento opuesto en las patas; esto constituiría un (1) módulo. Para nuestra construcción necesitaríamos de 4 módulos espaciados por barras de 4,5 centímetros pegadas a los triángulos fijos superiores, por lo que pensamos que la estructura será capaz de sostenerse por sí misma y desplazarse con ayuda de una fuerza externa que gire el cigüeñal.
Proceso Preconstructivo
En este paso cada uno indagó en internet información sobre el diseño y la proporción de ésta pata de mecanismo giratorio con empuje lineal. La mayor fuente de información fueron videos que mostraban claramente el proceso del mecanismo de Theo Jansen, proponiendo métodos constructivos.

Acto seguido quisimos probar el mecanismo de forma sencilla y rápida para ver las dimensiones y poder proponer la materialidad. Para esto le dimos valores a las dimensiones de cada pieza de la pata (algunas sacadas de internet, otras calculadas) y luego proporcionalmente lo adecuamos a la escala que estaba en un espacio estimado de 40x40xmás.
Hicimos la primera pata e inmediatamente la duplicamos para ver el mecanismo de un módulo. Pasó a ser una experiencia en dos dimensiones. Esto permitió tener seguridad de las dimensiones de cada parte, comprender de mejor manera cuáles elementos permanecían estáticos, mientras que otros se encargaban de la rotación y así poder prescindir o bien hacerlos de manera más sencilla (como en el caso de las patas).
Este pre-prototipo fue hecho con cartón forrado y las uniones eran chinches que de tope ocupaban un trozo de goma de borrar para permitir la rotación.
Prototipo
Construcción de Modelo
Materiales
- Papel: Gramaje 240 y Hojas Oficio(Bond)
- Alambre:
- Pegamento
Elementos
- Cigüeñal (alambre)
- Bielas (papel)
- Patas (papel)
Construcción de elementos

- Las bielas son de dos medidas de largo, 19,3 cm (1) y 12 cm (2)y 6mm de ancho, estas consisten en cortar hojas de papel tamaño oficio con las respectivas medidas y luego proceder a enrollar y pegar cada una de ellas para lograr que estas puedan soportar la carga del mecanismo al moverse.
- Al momento de desarrollar las patas nos dimos cuenta que todos sus puntos quedaban de forma coplanar, además de que no se movían como lo hacen las bielas que van unidas a ellas, por lo que decidimos que estas sean un solo volumen en lugar de una serie de bielas.
- Al igual que con las patas nos dimos cuenta que una bielas que se ubicaban de forma triangular era posible hacerlas como un solo volumen, a la cual llamaremos biela mayor.
- Se construyo un eje de 28 cm de largo con 1,5x1,5 cm de ancho, para que mantenga 3 puntos específicos (puntos B y C) de cada modulo en un sitio concreto funcionando como una estructura que permite al mecanismo moverse sin deformarse.
- El cigüeñal hecho con alambre es construido en un juego de medidas entre 3cm y 3,5cm para que al ensamblarlo el mecanismo se mueva sin chocar sus patas pero manteniendo un equilibrio, por lo mismo el cigueñal debe procurar que cuando unas patas estén en el aire, las otras estén en el suelo.
Ensamblado

Para hacer aparecer un módulo se unen primeramente las patas con sus respectivas bielas, que son los vínculos entre las patas y las bielas mayores. Estos son unidos con alambre, para permitir el movimiento fácil de las piezas. Al tener 8 módulos armados, se procede a ensamblar el total usando alambre. Este se inserta en los puntos A y B como se muestran en el esquema, de esta manera al girar el cigüeñal las patas se irán rotando y se podrá mover de forma rotativa.
Al momento de armar el total se hace presente una falla en los ejes -en el punto C- a causa de la tensión que generan las bielas 2 al moverse. El mecanismo carece de estabilidad, por lo que es necesario fijar estos puntos por medio de dos alambres que lo atraviesen.

Vista Aérea

Dos módulos unidos

Mecanismo terminado



Al corregir este error la estructura se puede mantener firme, por lo que al girar el cigüeñal se mantiene un equilibrio y una rotación de las patas.
Errores

El error principal de la construcción de la estructura fue la estabilidad que se producía al posar la estructura sobre una superficie. Por lo mismo fue necesario, al momento de exponer, explicar el mecanismo con el prototipo sobre las manos de algún compañero, ya que al apoyarlo generaba una sútil fractura que impedía el sostenimiento de su propio peso y la rotación ligera del mecanismo.
El problema recaía en la unión de las bielas con las patas (triángulos). Estas uniones medían todas lo mismo, pero contenían número de bielas diferente. Por lo que se generaba una fractura cuando era sólo una biela. Esto hacía que la estructura se quebrara en menor medida y no resistiera su propio peso.
El error no fue contemplado en el planteamiento del desafío, ya que al hacer el prototipo inicial (donde se calcularon las proporciones y se comprendió el mecanismo de la pata) sólo se experimento con un módulo de dos dimensiones. Este giraba mientras estaba extendido en la superficie y no erguido resistiendo su propio peso de manera vertical. Por lo que se debió haber experimentado con la estructura de 3 dimensiones de inmediato, para haber observado el comportamiento del peso.
Otro error, que nos dimos cuenta después que era importante, fue la construcción de las patas triangulares de manera isósceles rectángulo. Esto generaba que el mayor peso se distribuyera verticalmente por el borde dela estructura generando un traspaso de peso que no estaba en el centro y se volviera más fácil la fractura de sus patas.
Soluciones
Teniendo en cuenta que el principal error fue al estabilidad de la estructura debido a la debilidad de sus uniones, nos preguntamos cómo podíamos reforzarlas. Se debía corregir el tema de las diferencias en el número de bielas.
- Se nos ocurrió que podíamos duplicar las bielas para así dar mayor estabilidad y llenar la distancia producida por las uniones que contenían más bielas y por lo tanto eran más anchas. Impidiendo que la estructura se quebrase. Por lo que finalmente se estaría ensanchando una dimensión de las bielas para así dar mayor estabilidad
- También quisimos corregir las uniones de alambre. Que fueron hechas con una flexión del mismo para así generar un tope. Esta torcedura del alambre era imprecisa, ya que era hecha a pulso en un momento donde l estructura tenía poca maniobrabilidad. Una solución era generar este límite con cautín y estaño añadiendo un tope más grueso del mismo material sin la necesidad de la manipulación que volvía imprecisa la unión.
- Corregir el ángulo de las patas, ya que fue construído como un triángulo isósceles rectángulo. Se debe dejar con un ángulo más reducido que los 90° entre las medidas equivalentes, por lo que resulte ser un triángulo isósceles agudo. Esto genera que el peso vertical se distribuya más en el centro y no desde las orillas, provocando la inestabilidad y fractura de la estructura.
Conclusión
A modo de conclusión podemos darnos cuenta de la importancia del estudio y entendimiento empírico de los conceptos físicos que se requieren para poder llegar a un calce y a una simetría, lo cual es indispensable en una estructura como esta. En donde las medidas deben ser las más precisas para poder repartir las cargas equitativamente, y así generar un movimiento lineal y rotativo, y estabilidad a su misma vez.
También la importancia de más prototipos de ensayo para un resultado exitoso en el desafío. El ensayo y error son la base para alcanzar la seguridad en las múltiples variables que entrega una estructura con un mecanismo como este. Materialidad, construcción, calce, equilibrio, distribución de peso, estabilidad, fuerzas de roce, tracción, son sólo algunos de las dimensiones que intervienen para que el mecanismo y la estructura funcionen correctamente.
Así lograr y comprender cómo las obras de Theo Jansen pueden tener esa dualidad de ser tan ligeras y fuertes a la vez. Ligereza por el desplazamiento de su estructura con tan sólo la energía eólica, y fuerza por la realidad de su tamaño y la capacidad de mantenerse firme estando estática y en movimiento.
Notes
- ↑ C. Rivera Espinosa, Indeformab triangulo wiki, (Accesible en https://wiki.ead.pucv.cl/images/thumb/a/ad/Indeformab_triangulo_wiki.jpg/700px-Indeformab_triangulo_wiki.jpg (2014)).
- ↑ J. Baixas Forma Resistente, (Santiago de Chile: Ediciones ARQ, 2003)
- ↑ T. Jansen, Strandbeest, (Disponible en https://farm5.staticflickr.com/4049/4688531435_1d3d72d3ee_z.jpg.)
{kind=link}
{kind=link}